Project
Safe Planning & Control for Quadrotors
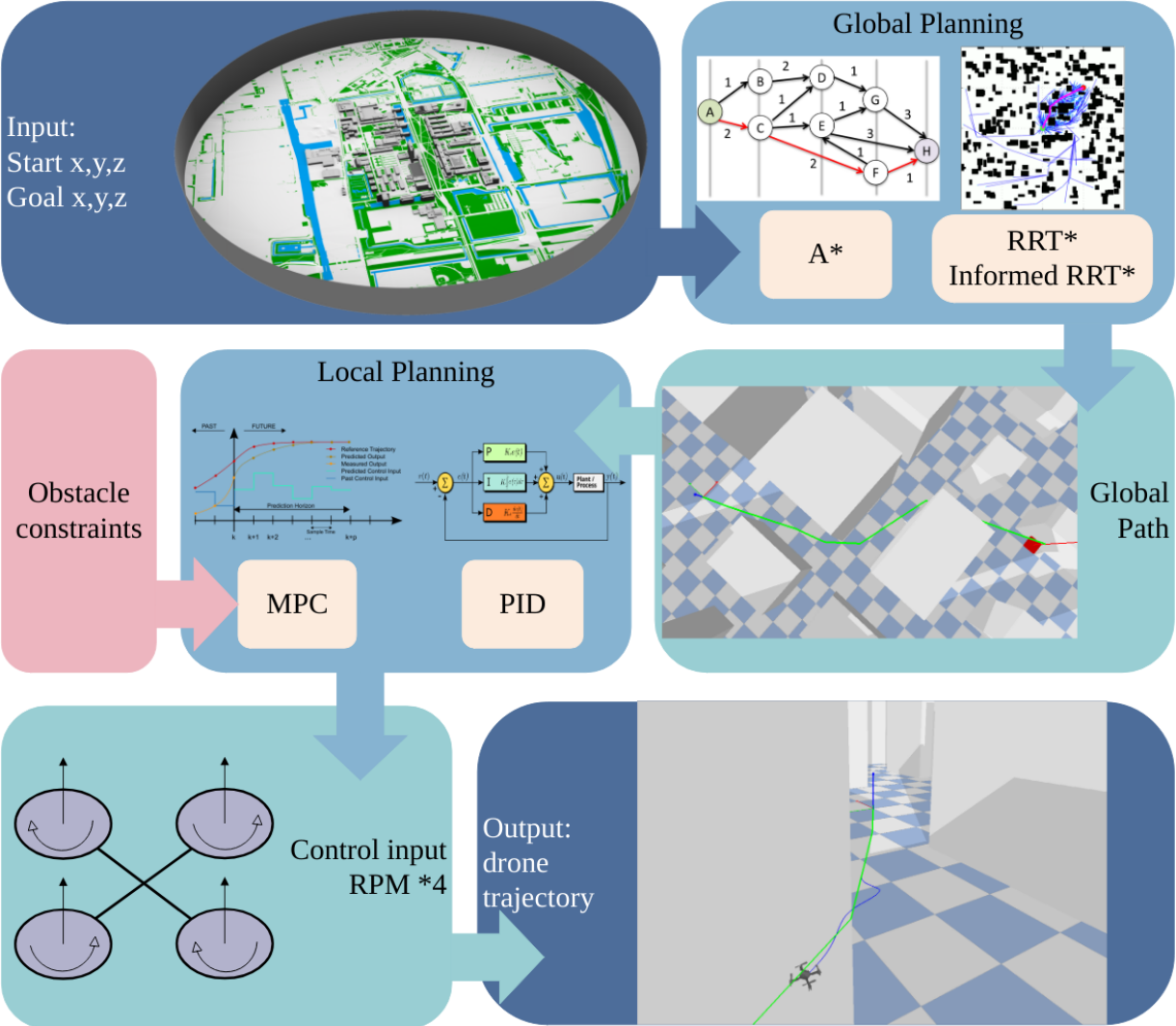
MPC + RRT*
Motivation
Drone delivery can be an attractive commercial oppturnity in urban arean, where the dron can deliver to the exact unit in a building. For drones navigate safely in the ciry, it is important to enforce both passive and active obstancle ovidance. In this project, we implement informed RRT* for global path planning, which achieve collision free tentative path. And we use MPC as local path follower which activate planes to avoid collision to moving obstacle.
Challenge
The challenge of this project is to use MPC for the direct dynamics control of the drone. Instead of treating this drone as a massed point, and rely on the low-level PID controller, we applied MPC directly to the lineralized dynamics of the drone, which enables optimal control for the drone pose. We also introduced the linearlication of both static and dynamic
Result
[Describe the results here.]